
數(shù)控木工雕刻機機器人的控制系統(tǒng)
數(shù)控木工雕刻機的雕銑機器人的控制系統(tǒng)是一個多變量非線性,、強耦合的控制系統(tǒng),,其動力學方程的建立與計算需要花費大量的時間,這使得機器人的實時控制變得較為困難,為了提高機器人控制系統(tǒng)的運行速度和處理能力,,對該系統(tǒng)采用分層遞階智能控制模式。如圖1所示:
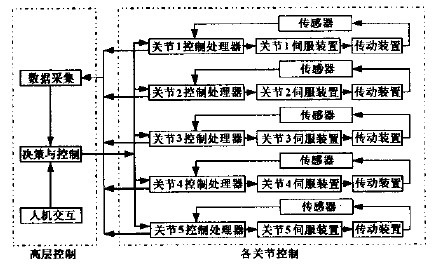
圖1 數(shù)控木工雕刻機機器人控制系統(tǒng)層次結(jié)構(gòu)框圖
數(shù)控木工雕刻機的雕銑機器人的高層控制采用高性能的微型計算機Pentium586實現(xiàn),,主要任務(wù)有兩個:一是負責系統(tǒng)初始化,、人機交互、系統(tǒng)診斷和錯誤報告,、組織管理,,完成機器人的路徑規(guī)劃,并將機器人末端執(zhí)行器笛卡爾坐標轉(zhuǎn)換為關(guān)節(jié)坐標,,向各關(guān)節(jié)控制器(單片機)發(fā)出控制指令,,并將運算出的各關(guān)節(jié)運動信息數(shù)據(jù)送到公用RAM中,同時接收各關(guān)節(jié)控制器(單片機)返回的反饋數(shù)據(jù)為下一步控制提供依據(jù),,這是普通機器人所共有的,;二是完成雕刻圖像或圖形的模式識別,提取雕刻風格和特征,,這是數(shù)控木工雕刻機雕銑機器人所特有的,。各關(guān)節(jié)的伺服控制選用8098單片機,該級單片機主要完成接收主機發(fā)給的位置運動控制指令,,完成關(guān)節(jié)的軌跡插補,,負責數(shù)控木工雕刻機的雕銑機器人具體運動的動作的實施,并接收關(guān)節(jié)運動數(shù)據(jù),,對關(guān)節(jié)伺服系統(tǒng)進行實時控制,。5塊單片機控制器的硬件結(jié)構(gòu)完全一樣,可以實現(xiàn)整體系統(tǒng)的通用化,、標準化,、模塊化,增加系統(tǒng)內(nèi)部的可互換性,,并且可以實現(xiàn)在某種程度上的冗余,,提高系統(tǒng)的可靠性主機與五片單片機之間,通過公用RAM來互通數(shù)據(jù)和控制命令,。數(shù)控木工雕刻機的雕銑機器人的控制系統(tǒng)的硬件結(jié)構(gòu)如圖2所示,,其中設(shè)置截流保護電路和延時保護電路是為了提高系統(tǒng)工作的可靠性。
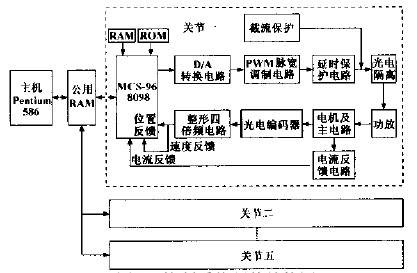
圖2 數(shù)控木工雕刻機機器人控制系統(tǒng)硬件結(jié)構(gòu)圖
推薦產(chǎn)品

數(shù)控加工中心YF-C850 此機型的整體機械機構(gòu)采用樹脂砂鑄件制造,,內(nèi)部加強筋加多加大高剛性設(shè)計,加強機械精度的持久性及加工精度的穩(wěn)定性,,并保證了整體長久不變形,。該機型具有自動換刀裝置及三軸、四軸聯(lián)動控制功能,,系統(tǒng)一次裝夾,, 可自動連續(xù)對四面進行銑、鉆,、鉸及絲攻等多種

高速精密雕銑機YF-G660 此款機型結(jié)合了以往輕重型機器的各種性能優(yōu)點,,采用低床身和立柱橫梁一體的設(shè)計結(jié)構(gòu), 再配套高性能和大功率的伺服電機,,高精度和超規(guī)格的絲桿,、導軌,高轉(zhuǎn)速和高精度的主軸,,使得機床具有穩(wěn)定性好,、剛性強、加工平衡,、加工精度高等功能特點,。該機是一款專為

高速數(shù)控龍門銑YF-D2516 該型號龍門雕銑機床采用了大型肋骨強化和龍門式大床體設(shè)計,并經(jīng)過多次實效處理消除應(yīng)力,,能長久的保持良好的剛性和精度,。該機型是專為加工大工件所設(shè)計,,其填補了目前市場上普通雕銑機無法加工大尺寸工件的空白,。其具有的傳動平穩(wěn)、剛性高,、機型重,、精度高、

龍門數(shù)控高速銑YF-D1311 本型號數(shù)控高速銑床采用合理的結(jié)構(gòu)強度及內(nèi)部加強肋的搭配,,并在橫梁上增加一根X軸向的導軌,,提供機械之整體的高剛性,增強了在切削加工時的穩(wěn)定性,。再配備高精度的進口直線導軌,、絲桿和主軸,,使該機型的性能既可用于雕刻也可以用于雕銑,同時也起到了特定加
